စက်မှုကုန်ထုတ်လုပ်ငန်းသည် စီးပွားရေးနှင့် လူမှုရေးဖွံ့ဖြိုးတိုးတက်မှုကို မြှင့်တင်ရန် အရေးကြီးသော ချိတ်ဆက်မှုတစ်ခုဖြစ်သည်။ လက်ရှိတွင်၊ အလိုအလျောက် ဂဟေဆော်သည့် ကိရိယာများဆိုင်ရာ သုတေသနပြုမှုသည် ပိုမိုနက်ရှိုင်းပြီး ကွန်ကရစ်ကို ဂဟေဆော်သည့် အဆောက်အဦ အမျိုးအစားများစွာ ထုတ်လုပ်ရာတွင် တွင်ကျယ်စွာ အသုံးပြုစေသည်။
အလိုအလျောက်ဂဟေဆော်ခြင်းလုပ်ငန်းစဉ်တွင်၊ ဂဟေဆော်သည့် စည်းဝေးပွဲကွာဟချက်ကို အတိုင်းအတာတစ်ခုအထိ အသိဉာဏ်နှင့် ဒစ်ဂျစ်တယ် ကျိုးကြောင်းဆီလျော်စွာ ထိန်းချုပ်မှုတွင်၊ ဤအခြေခံပေါ်တွင် workpiece အနေအထားကွာခြားချက်၊ workpiece joint deviation နှင့် အခြားထည့်သွင်းစဉ်းစားရမည့်အချက်များ။ ထို့ကြောင့် လေဆာဂဟေချုပ်ရိုးခြေရာခံခြင်းနည်းပညာသည် ဂဟေဆော်ခြင်းလုပ်ငန်းစဉ်တွင် အရေးပါသောအခန်းကဏ္ဍမှ ပါဝင်ပါသည်။
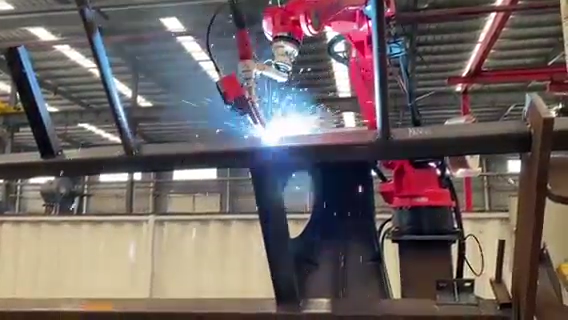
ဘိလပ်မြေ တိုင်ကီ ကား အခြေစိုက် ဂဟေဆော်ခြင်း ခုနစ်ဝင်ရိုး မြေကြီး ပတ်လမ်း ရှစ်ဝင်ရိုး လေဆာဂဟေဖြင့် လှည့်ခြင်း
- workpiece ၏ အနေအထားသည် အလွန်ကွဲပြားပါသည်။
- workpiece ချိတ်ဆက်မှုတွင် Deviation ရှိနေသည်။
- ဂဟေဆက်ရာတွင် တိကျမှု မြင့်မားရန် လိုအပ်ပါသည်။
- ဂဟေပတ်ဝန်းကျင်နှင့် မီးခိုးငွေ့များ မကောင်းခြင်း။
ဤကိစ္စတွင်၊ Yooheart ဉာဏ်ရည်ထက်မြက်သောစက်ရုပ် HY1006A-145 ကို ပျော့ပြောင်းမှု၊ တည်ငြိမ်မှုနှင့် ယုံကြည်စိတ်ချရမှုမြင့်မားသော လေဆာဂဟေချုပ်ရိုးခြေရာခံစနစ်ဖြင့် ဂဟေဆော်ရန်အတွက် အသုံးပြုပါသည်။
ဂဟေတစ်ခုစီမလုပ်မီ၊ စက်ပစ္စည်းသည် ဂဟေချုပ်ရိုးတည်နေရာကို ဂဟေချုပ်ရိုးတည်နေရာမှတစ်ဆင့် ဂဟေချုပ်ရိုး၏သြဒိနိတ်ကိုစကန်ဖတ်ပြီး မှတ်တမ်းတင်ကာ၊ ထို့နောက်အတွင်းပိုင်း အယ်ဂိုရီသမ်ဖြင့် သြဒိနိတ် offset ကိုတွက်ချက်ကာ ဂဟေဆက်ပြီးနောက် ထုတ်ကုန်၏အစစ်အမှန်သွေဖည်မှုကို အချိန်မီပြုပြင်ရန် ရည်ညွှန်းသြဒိနိတ်ဘောင်များကို အချိန်မီထည့်သွင်းပေးသည်။
"လေးမှတ်လမ်းဆုံ" နည်းလမ်း
အားလုံးသိကြသည့်အတိုင်း၊ အချက်နှစ်ချက်သည် မျဉ်းဖြောင့်ကိုဆုံးဖြတ်သော်လည်း workpiece စည်းဝေးမှုသည် Angle ကိုဖွဲ့စည်းမည်ဖြစ်ပြီး၊ သမားရိုးကျ algorithm သည် ၎င်း၏အနေအထားကိုဆုံးဖြတ်၍မရပါ၊ ၎င်းသည် လေးနာရီအချိန်၌ "လမ်းဆုံ" နည်းလမ်းကိုအသုံးပြု၍ မျဉ်းနှစ်ကြောင်းဖြတ်လိုက်ခြင်းသည် လမ်းဆုံအမှတ်ကိုထုတ်ပေးသည်၊ လူသိများသောအချက်လေးချက်ကိုသြဒိနိတ်သတ်မှတ်ခြင်းမှတဆင့်အထူး algorithm သည် လမ်းဆုံအမှတ်ကိုရရှိရန် ရည်ရွယ်ချက်ကိုတွက်ချက်သည်။

လေဆာချုပ်ရိုးခြေရာခံစနစ်
လေဆာဂဟေချုပ်ရိုးခြေရာခံခြင်းစနစ်သည် အဓိကအားဖြင့် လေဆာအာရုံခံကိရိယာများနှင့် စောင့်ကြည့်ရေးကိရိယာများဖြင့် ဖွဲ့စည်းထားသည်။ လေဆာအာရုံခံကိရိယာအား ဂဟေချုပ်ရိုးအချက်အလက်များ၏ တက်ကြွစွာရယူမှုနှင့် အချိန်နှင့်တစ်ပြေးညီ လုပ်ဆောင်ခြင်းအတွက် အသုံးပြုပြီး စက်မှုစက်ရုပ်များနှင့် အချိန်နှင့်တစ်ပြေးညီ ဆက်သွယ်မှုကို ထိန်းသိမ်းထားသည်။ Monitoring terminal မော်နီတာများနှင့် အာရုံခံကိရိယာများကို စီစဉ်သတ်မှတ်ပေးသည်။ စနစ်သည် အသိဉာဏ်ရှိသော ဂဟေဆက်ခြင်း၏လိုအပ်ချက်များကိုဖြည့်ဆည်းရန် ဂဟေမစတင်မီတွင် ရှာဖွေခြင်း၊ ခြေရာခံခြင်းနှင့် စကင်န်ဖတ်ခြင်း စသည့်လုပ်ဆောင်ချက်များပါရှိသည်။
အလုပ်လုပ်ခြင်းမူ- Weld seam scanning၊ point cloud image fit၊
မောင်ချောနွယ်ပန်းကန်

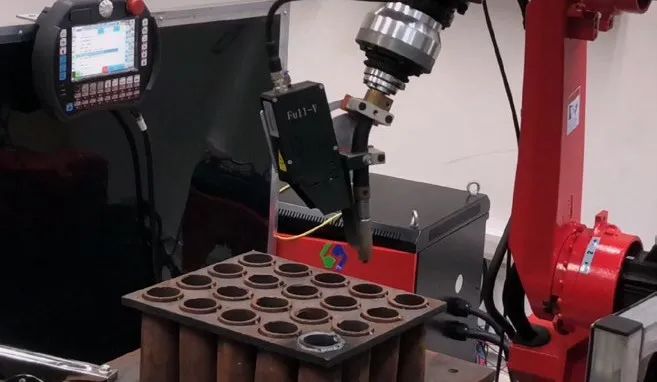
အပေါက်ဝိုင်းအော်တိုပလပ်ဂဟေဖြေရှင်းချက်

မြို့ပတ်ချုပ်ရိုးဖြေရှင်းချက်

Tubeplate ဖြေရှင်းနည်းများ
Yunhua Intelligent သည် လျင်မြန်စွာဖြန့်ကျက်မှု၊ ဘေးကင်းပြီး ထိရောက်သော အလိုအလျောက်စနစ်ဖြေရှင်းချက်များနှင့် အချိန်နှင့်တစ်ပြေးညီစနစ်ဖြေရှင်းချက်များကို ပေးစွမ်းနိုင်ပါသည်။ လေဆာအမြင်ဂဟေချုပ်ရိုးခြေရာခံစနစ်သည် ဂဟေစက်ရုပ်အား အချိန်နှင့်တစ်ပြေးညီ ဂဟေချုပ်ရိုးရှာဖွေခြင်းနှင့် ခြေရာခံခြင်းတို့ကို သိရှိနိုင်စေပြီး ဂဟေချုပ်ရိုးကို ပြုပြင်ပေးပါသည်။ ထို့ကြောင့် ဂဟေဆော်ခြင်းလုပ်ငန်းစဉ်ကို သိရှိနားလည်စေရန်အတွက် elli
စာတိုက်အချိန်- ဧပြီလ-၀၉-၂၀၂၂



