စက်ရုပ် Mig ဂဟေဆော်ခြင်း ----Street Lamp Pole ဂဟေဖြေရှင်းချက်
အညွှန်း
1. အလုပ်အပိုင်းအချက်အလက်
2. စက်ရုပ်ဂဟေဖြေရှင်းချက် ခြုံငုံသုံးသပ်ချက်
3. စက်ရုပ်ဂဟေဖြေရှင်းချက်လုပ်ငန်းစဉ်
4. စက်ရုပ်ဖြေရှင်းချက် စက်ပစ္စည်းဖွဲ့စည်းမှု
5. ပင်မလုပ်ဆောင်ချက် 6. စက်ကိရိယာများမိတ်ဆက်ခြင်း။
7. တပ်ဆင်ခြင်း၊ ကော်မရှင်ပေးခြင်းနှင့် လေ့ကျင့်ပေးခြင်း
8. စစ်ဆေးပြီး လက်ခံပါ။
9. ပတ်ဝန်းကျင်လိုအပ်ချက်များ
10. အာမခံနှင့် ရောင်းချပြီးနောက်ဝန်ဆောင်မှု
11. ပေးပို့ခြင်း ပူးတွဲပါစာရွက်စာတမ်း
စက်ရုပ်ဂဟေလျှောက်လွှာ ဗီဒီယို
1၊ Workpiece အချက်အလက်
-ဂဟေဝိုင်ယာအချင်း: Ф1.2mm
-ဂဟေဆော်ခြင်းလုပ်ငန်းစဉ်: ဓာတ်ငွေ့အကာအရံ ဂဟေဆော်ခြင်း/Mig ဂဟေဆော်ခြင်း။
-Weld ချုပ်ရိုးအမျိုးအစား: မျဉ်းဖြောင့်အမျိုးအစား၊ စက်ဝိုင်းအမျိုးအစား
-အကာအရံဓာတ်ငွေ့:99% CO2
-လည်ပတ်မှုနည်းလမ်းစက်ရုပ် အလိုအလျောက် ဂဟေဆော်ခြင်း : လက်ဖြင့် တင်ခြင်းနှင့် ဖြုတ်ချခြင်း၊
-ပြင်ဆင်ခြင်း Error:≤ 0.5mm
-ပန်းကန်သန့်ရှင်းရေး :သတ္တုတောက်ပမှုကို weld နှင့်တွေ့နိုင်သည်။နှစ်ဖက်စလုံးတွင် weld ချုပ်ရိုး၏အမြင့်နှစ်ဆအကွာအဝေးအတွင်း
2၊ စက်ရုပ်ဂဟေဖြေရှင်းချက် ခြုံငုံသုံးသပ်ချက်
လုပ်ငန်းစွမ်းဆောင်ရည်တိုးတက်စေရန်အတွက်၊ လုပ်ငန်းခွင်၏ပကတိအခြေအနေအရ Honyen စက်ရုံသည် မတူညီသောထုတ်ကုန်များနှင့်သဟဇာတဖြစ်စေရန်အတွက် မတူညီသောကိရိယာများဖြင့် အစားထိုးနိုင်သည့် ဂဟေစက်စက်ရုပ်အလုပ်ရုံတစ်ခုကို ပံ့ပိုးပေးမည်ဖြစ်သည်။စက်ရုပ်ပုံစံ- HY1006A-145 ဂဟေဆက်စက်၊ ဂဟေပါဝါရင်းမြစ်၊ စက်ရုပ်အတွက် အထူးဂဟေမီးတိုင်၊ လျှပ်စစ်ထိန်းချုပ်ရေးဝန်ကြီးအဖွဲ့နှင့် ခလုတ်များ၊ ရေအေးပေးစက်၊ နှစ်ထပ်အလုပ်လုပ်သည့်နေရာချထားပေးသည့်နေရာများ၊ ကိရိယာတန်ဆာပလာများ၊ လုံခြုံရေးအကာအကွယ်ခြံစည်းရိုး (ချန်လှပ်ထားနိုင်သည်) နှင့် အခြား အစိတ်အပိုင်းများ။
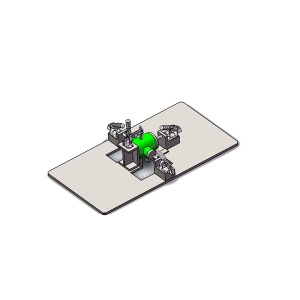
3၊ Mig Welding စက်ရုပ်အလုပ်ရုံ အပြင်အဆင် မိတ်ဆက်
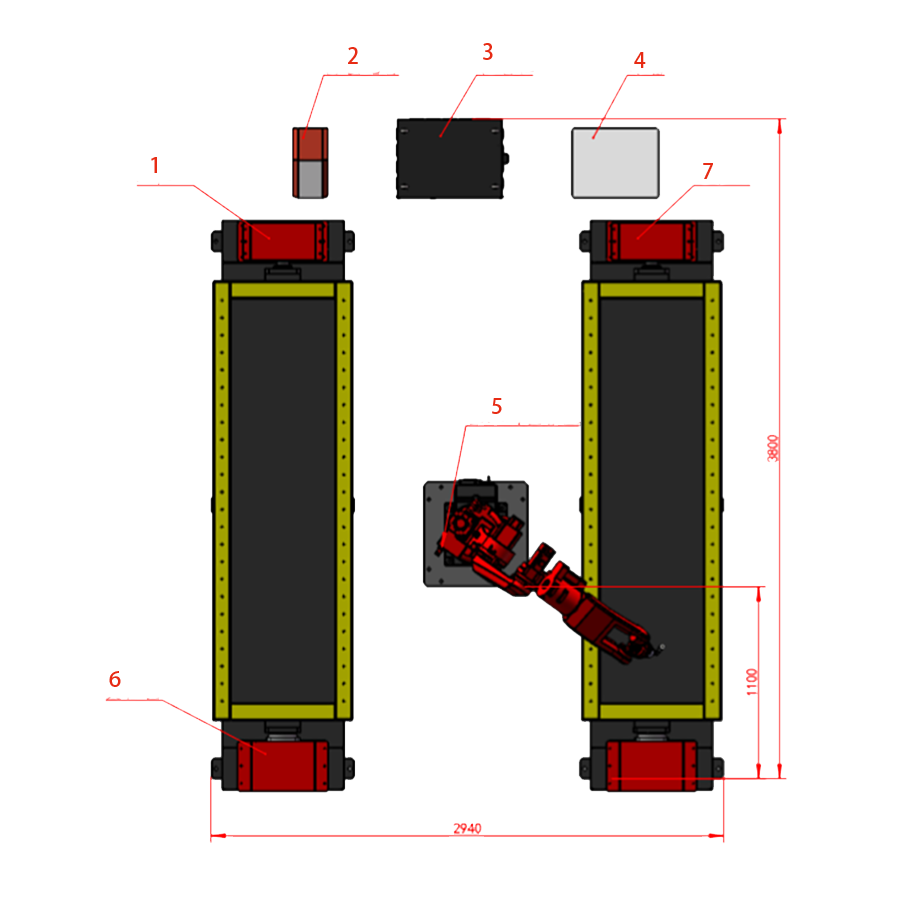
Honyen စက်ရုပ် arc welding workstation အပြင်အဆင်
၁၊ အလုပ်ရုံ ၁
2, Welding Power အရင်းအမြစ်
3၊ စက်ရုပ်ထိန်းချုပ်ကိရိယာ
4, Water cooling chiller
5၊ Honyen arc ဂဟေဆက်စက်ရုပ်၊ HY1006A-145
6, Positioner
၇၊လုပ်ငန်းစခန်း ၂
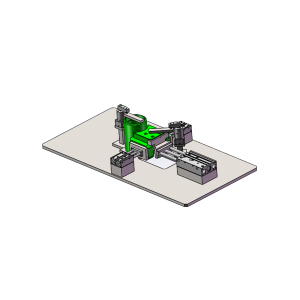
ဓာတ်တိုင်အစိတ်အပိုင်းများ
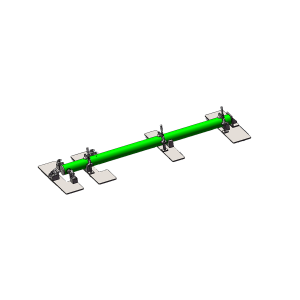
ဓာတ်တိုင်အစိတ်အပိုင်းများ ၂
စက်ရုပ်ဂဟေဖြေရှင်းနည်းများ အပြင်အဆင် ၁
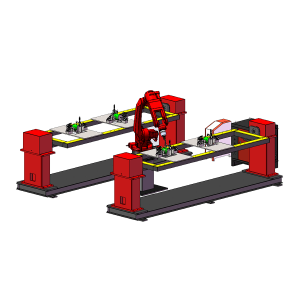
လျှပ်စစ်ဝင်ရိုး အစိတ်အပိုင်းများ တပ်ဆင်မှုများ ၃
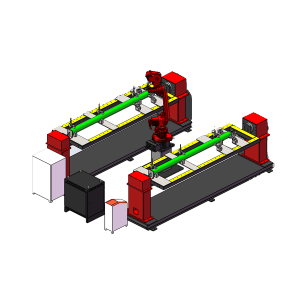
စက်ရုပ်ဂဟေဖြေရှင်းနည်းများ အပြင်အဆင် ၂
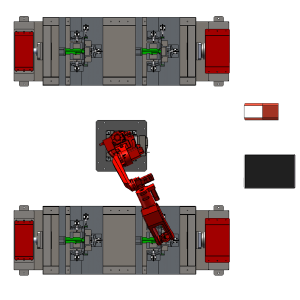
စက်ရုပ်ဂဟေဖြေရှင်းနည်းများ အပြင်အဆင် ၃
4. စက်ရုပ်ဂဟေဖြေရှင်းချက်လုပ်ငန်းစဉ် I. အော်ပရေတာသည် ဘူတာရုံ 1 တွင် workpiece ကို loading လုပ်ပြီး ကုပ်လိုက်ပြီးနောက်၊အော်ပရေတာသည် စက်ရုပ်ကြိုတင်မှာယူမှုစတင်သည့်ခလုတ် 1 ကိုနှိပ်ပြီး စက်ရုပ်သည် အလိုအလျောက် ဂဟေဆော်ခြင်းစတင်သည်။
IIအော်ပရေတာသည် workpiece loading အတွက် station 2 သို့သွားသည် ။စက်ရုပ်ကို တင်ပြီးနောက်၊ အော်ပရေတာသည် စက်ရုပ်ကြိုတင်မှာယူမှုစတင်သည့်ခလုတ် 2 ကိုနှိပ်ပြီး စက်ရုပ်ဂဟေဆက်ခြင်း အပြီးသတ်ရန်အတွက် စောင့်ဆိုင်းနေပါသည်။
IIIစက်ရုပ်သည် ဘူတာရုံ 1 တွင် ဂဟေဆက်ခြင်း ပြီးသောအခါ၊ ၎င်းသည် ဘူတာရုံ 2 ၏ အစီအစဉ်ကို အလိုအလျောက် လုပ်ဆောင်သည်။
Ⅳထို့နောက် အော်ပရေတာသည် station 1 တွင် Workpiece ကို ဖြုတ်ပြီး workpiece အသစ်တစ်ခုကို တင်ပါသည်။
V. အစီအစဥ် သံသရာ။
5. စက်ရုပ်ဖြေရှင်းချက် စက်ပစ္စည်းဖွဲ့စည်းမှု
| ကုသိုလ်ကံ | မော်ဒယ် | အရေအတွက် | အမှတ်တံဆိပ် | ပြီလေ။ | ||
| ၁ | ၁.၁ | စက်ရုပ်ကိုယ်ထည် | HY1006A-145 | 1 Set | Honyen | စက်ရုပ်ကိုယ်ထည်၊ ထိန်းချုပ်မှုအဖွဲ့၊ ပရိုဂရမ်မာ သင်ကြားရေးတို့ ပါဝင်သည်။ |
| ၁.၂ | စက်ရုပ်ထိန်းချုပ်ရေးဝန်ကြီးအဖွဲ့ | 1 set | ||||
| ၁.၃ | ဂဟေဆော်စွမ်းအားအရင်းအမြစ် | 1 Set | Honyen | Megmeet ဂဟေသမား | ||
| ၁.၄ | ရေတိုင်ကီ | 1 Set | Honyen | |||
| ၁.၅ | ရေအအေးဂဟေမီးတိုင် | 1 Set | Honyen | |||
| 2 | 1 Axis positioner | HY4030 | 2 Set | Honyen | 2.5 မီတာ၊ 300 ကီလိုဂရမ်ဝန်၊ 1.5KW အဆင့်သတ်မှတ်ထားသော အထွက်ပါဝါ | |
| 3 | လျှပ်စစ်ထိန်းချုပ်ရေးစခန်း | 2 Set | Honyen | |||
| 4 | စနစ်ဒီဇိုင်း၊ ပေါင်းစပ်ခြင်းနှင့် ပရိုဂရမ်ရေးဆွဲခြင်း။ | 1 Set | Honyen | |||
| 5 | လုံခြုံရေးစည်းရိုး | 1 Set | Honyen | ရွေးချယ်ခွင့် | ||
6. အဓိကလုပ်ဆောင်ချက် ဂဟေအရည်အသွေးနှင့် ထိရောက်မှုကိုသေချာစေရန်အတွက် စက်ရုပ်စနစ်သည် ပြီးပြည့်စုံသော မိမိကိုယ်ကိုကာကွယ်မှုလုပ်ဆောင်ချက်နှင့် arc ဂဟေဒေတာဘေ့စ်ကို တပ်ဆင်ထားပါသည်။အဓိကလုပ်ဆောင်ချက်များမှာ အောက်ပါအတိုင်းဖြစ်သည်။
မူရင်းလမ်းကြောင်းကို ပြန်စပါ။: အကာအရံဓာတ်ငွေ့စီးဆင်းမှု မူမမှန်သောအခါ၊ ဂဟေဆော်စဉ်အတွင်း ဂဟေဝိုင်ယာများ လောင်ကျွမ်းပြီး ယာယီရပ်တန့်သွားသောအခါ၊ "ဆက်ဂဟေဆက်ခြင်း" ဟူသော အမိန့်ကို ဖြေရှင်းပြီးနောက် စက်ရုပ်သည် တိုက်ရိုက် ခေါ်ဆိုနိုင်ပြီး၊ စက်ရုပ်သည် မည်သည့်နေရာမှ ဂဟေဆက်ခြင်းကို ဆိုင်းငံ့ထားသော အနေအထားသို့ အလိုအလျောက် ဆက်လုပ်နိုင်သည်။
အမှားရှာဖွေခြင်းနှင့်ခန့်မှန်း: နှိုးစက်ဖြစ်သွားပြီးနောက်၊ စက်ရုပ်သည် ထိန်းချုပ်ကိရိယာမှ ဒေတာကို ရယူပြီး၊ အမှားအယွင်းအပိုင်းများကို မှန်းဆကာ အမှားအယွင်းများသော အစိတ်အပိုင်းများစာရင်းကို တစ်ဖန်ပေးကာ၊ သင်ကြားမှုဆွဲသီးဖြင့် ဆိုက်တွင် ကြည့်ရှုနိုင်သည့် ကွန်ပျူတာတွင် အစိတ်အပိုင်းများ အစားထိုးခြင်းနှင့် ရောဂါရှာဖွေခြင်း၏ အပိုင်းကို ပြသသည်။ထို့အပြင်၊ ကွန်ပျူတာသည် စက်ရုပ်ထံမှ လည်ပတ်မှုဒေတာကို ပုံမှန်ရယူပါ၊ ရရှိသောဒေတာကို ပိုင်းခြားစိတ်ဖြာကာ စက်ရုပ်၏ လည်ပတ်မှုအခြေအနေသည် ပုံမှန်ဟုတ်မဟုတ် စစ်ဆေးဆုံးဖြတ်ကာ နောင်လာမည့်အမှားကို ဖြေရှင်းရန် သုံးစွဲသူကို နှိုးဆော်ထားသည်။
ယာဉ်တိုက်မှု တိုက်ဖျက်ရေး လုပ်ဆောင်ချက်: စက်ရုပ်ဂဟေမီးတိုင်သည် ပြင်ပအရာဝတ္တုများနှင့် ပျက်ကျသောအခါ၊ စက်ရုပ်သည် ဂဟေမီးရှူးတိုင်နှင့် စက်ရုပ်ကိုယ်ထည်ကို ကာကွယ်ရန် လုပ်ဆောင်သည်။
ကျွမ်းကျင်သူဒေတာဘေ့စ်: ပရိုဂရမ်တစ်ခုတွင် လိုအပ်သော ဂဟေဆက်မှုအခြေအနေများကို သတ်မှတ်ခြင်းဖြင့်၊ ဤစနစ်သည် ဂဟေချုပ်ရိုး၏ အစီအစဉ်ကို အလိုအလျောက် ပြီးမြောက်စေကာ သက်ဆိုင်ရာ ဂဟေဘောင်များကို ချိန်ညှိပေးနိုင်သည်။
သင်ကြားရေးနှင့် ပရိုဂရမ်ရေးဆွဲခြင်း။: သင်ကြားမှုဆွဲသီးမှတဆင့် on-site programming ကိုနားလည်သဘောပေါက်ပါ။
ရက်ကန်းဂဟေ: ဂဟေဆော်ခြင်းလုပ်ငန်းစဉ်အတွင်း စက်ရုပ်သည် ဘုံလွှဲဂဟေဆော်သည့်အဝိုင်းအမျိုးအစားနှင့် Z အမျိုးအစားတို့ကိုသာ သိရှိနိုင်မည်ဖြစ်သည်။၎င်းသည် ဖောက်သည်၏လွှဲဂဟေဆော်သည့်လုပ်ဆောင်ချက်ကို စက်ရုပ်ပုံသဏ္ဍာန်နှင့်အညီ ဂဟေဆက်ကြောင်းအကျယ်ကို ဂဟေခိုင်မှုနှင့် ဂဟေဆက်ခြင်းစွမ်းဆောင်ရည်ကို တိုးမြင့်လာစေရန်အတွက် စက်ရုပ်အား ကူညီပေးပါသည်။
အဆင့်အတန်းပြသခြင်း။: စက်ရုပ်သည် ပရိုဂရမ်လည်ပတ်မှုအခြေအနေ၊ ဂဟေဆော်သည့်လုပ်ငန်းစဉ်ပါရာမီတာပြောင်းလဲမှုများ၊ စနစ်ပါရာမီတာပြောင်းလဲမှုများ၊ စက်ရုပ်၏လက်ရှိအနေအထား၊ လုပ်ဆောင်မှုမှတ်တမ်းများ၊ ဘေးကင်းရေးအချက်ပြမှုများ၊ အချက်ပြမှုများ၊ အချက်ပြမှတ်တမ်းများ စသည်တို့အပါအဝင် စက်ရုပ်စနစ်တစ်ခုလုံး၏ လည်ပတ်မှုအခြေအနေကို ပြသနိုင်သည်၊ သို့မှသာ သုံးစွဲသူများ အသုံးပြုနိုင်မည်ဖြစ်သည်။ စက်ရုပ်စနစ်၏ အခြေအနေကို အချိန်မီနားလည်ပြီး ပြဿနာများကို ကြိုတင်ကာကွယ်ပါ။
အဝင်/အထွက်ဖိုင်များစက်ရုပ်စနစ်ရှိ ဖိုင်များနှင့် ပရိုဂရမ်ဖိုင်များကို စက်ရုပ်စနစ်အတွင်းရှိ SD ကတ်တွင် သိမ်းဆည်းနိုင်ပြီး စက်ရုပ်ထိန်းချုပ်ကိရိယာအတွင်းတွင်လည်း ပြင်ပစက်ပစ္စည်းများတွင် သိမ်းဆည်းနိုင်သည်။အော့ဖ်လိုင်းပရိုဂရမ်ဆော့ဖ်ဝဲဖြင့်ရေးသားထားသောပရိုဂရမ်များကို Robot controller တွင်ထည့်သွင်းနိုင်သည်၊ ၎င်းသည်ဖောက်သည်များအားစနစ်ဖိုင်များကိုပုံမှန်အရန်ကူးရန်ကူညီပေးသည်၊ စက်ရုပ်စနစ်တွင်ပြဿနာရှိသောအခါ၊ စက်ရုပ်၏ပြဿနာများကိုဖြေရှင်းရန်အတွက်ဤအရန်ကူးယူမှုကိုပြန်လည်ရယူနိုင်သည်။
7၊ စက်ပစ္စည်းများမိတ်ဆက်ခြင်း။ HY1006A-145 သည် ဉာဏ်ရည်ထက်မြက်သော လုပ်ဆောင်ချက်ပါရှိသော စွမ်းဆောင်ရည်မြင့် စက်ရုပ်ဖြစ်သည်။ဓာတ်ငွေ့အကာအရံများကို ဂဟေဆော်ခြင်းနှင့် ဖြတ်တောက်ခြင်းဆိုင်ရာ အသုံးချမှုများအတွက် သင့်လျော်သည်။၎င်း၏ထူးခြားချက်များမှာ ပေါ့ပါးပြီး ကျစ်လစ်သောဖွဲ့စည်းပုံဖြစ်သည်။
arc welding applications များအတွက်၊ Honyen သည် မူလယုံကြည်စိတ်ချရမှုကို အာမခံရုံသာမက အလွန်ကောင်းမွန်သော ကုန်ကျစရိတ်စွမ်းဆောင်ရည်ကိုလည်း သိရှိနိုင်သည့် ပေါ့ပါးပြီး ကျစ်လစ်သောလက်တံကို အောင်မြင်စွာ ဒီဇိုင်းထုတ်ထားပါသည်။
Honyen သည် စက်ရုပ်၏ ရွေ့လျားမှုအမြန်နှုန်းနှင့် တိကျမှုကို မြှင့်တင်ပေးနိုင်သော၊ အော်ပရေတာ၏ ဝင်ရောက်စွက်ဖက်မှုကို လျှော့ချနိုင်ပြီး ဓာတ်ငွေ့အကာအရံများကို ဂဟေဆော်ခြင်းနှင့် ဖြတ်တောက်ခြင်းအတွက် လုပ်ဆောင်နိုင်စွမ်းကို မြှင့်တင်ပေးနိုင်သည့် အဆင့်မြင့် servo နည်းပညာကို အသုံးပြုထားသည်။
| ဝင်ရိုး | ဝန်ဆောင်ခ | အထပ်ထပ် | ပါဝါစွမ်းရည် | ပတ်ဝန်းကျင် | အလေးချိန် | တပ်ဆင်ခြင်း။ |
| 6 | 10 | ၀.၀၈ | 6.5KVA | 0~45℃20~80%RH (စိုထိုင်းဆမရှိ) | 300 ကီလိုဂရမ် | မြေပြင်/မျက်နှာကျက် |
| ရွေ့လျားမှုအတိုင်းအတာ J1 | J2 | J3 | J4 | J5 | J6 | IP အဆင့် |
| ±170° | +80°~-150° | +95°~-72° | ±170° | +115°~-140° | ±220° | IP54/IP65(လက်ကောက်ဝတ်) |
| အမြင့်ဆုံးမြန်နှုန်း J1 | J2 | J3 | J4 | J5 | J6 | |
| 158°/s | 145°/s | 140°/s | 217°/s | 172°/s | 500°/s |
အပြည့်အဝ Chinese operation interface နှင့် ကီးဘုတ်လုပ်ဆောင်ချက်အပြည့်အစုံဖြင့် အင်္ဂလိပ်ဘာသာသို့ ပြောင်းလဲနိုင်သည်။
I/O interface၊ Modbus၊ Ethernet စသည်တို့အပါအဝင် အမျိုးမျိုးသော ဆက်သွယ်မှုများကို ပံ့ပိုးပေးသည်။
စက်ရုပ်များစွာနှင့် အခြားပြင်ပစက်ပစ္စည်းများနှင့် ချိတ်ဆက်မှုများကို ပံ့ပိုးပေးသည်။
အရွယ်အစားကြီးသော ရောင်စုံထိတွေ့မျက်နှာပြင်
စက်ရုပ်လက်မောင်းကို အကာအကွယ်ပေးကာ နှောင့်ယှက်မှုကို လျှော့ချပေးသည့် ယာဉ်တိုက်မှု ဆန့်ကျင်သည့် ကိရိယာကို ပြင်ဆင်ထားသည်။
စက်ရုပ် ရွေ့လျားမှု ထိန်းချုပ်မှု သည် အကောင်းဆုံး လမ်းကြောင်း စီစဉ်ပေးသည်
ရာနှင့်ချီသော လုပ်ဆောင်ချက်အိတ်များနှင့် လုပ်ဆောင်ချက်များသည် ပရိုဂရမ်ရေးဆွဲခြင်းကို ရိုးရှင်းစေသည်။
SD ကတ်မှတစ်ဆင့် ဒေတာကို အရန်ကူးရန်နှင့် ကူးယူရန် အဆင်ပြေသည်။
Positioner

Honyen Head-tail double support positioner သည် workpiece ကို လှည့်ရန်၊ စက်ရုပ်နှင့် ပူးပေါင်းကာ၊ ဂဟေဆက်ရန်အတွက် ကောင်းမွန်သော အနေအထားသို့ ရောက်ရှိပြီး ကောင်းမွန်သော ဂဟေဆော်သည့် စွမ်းဆောင်ရည်ကို ရရှိစေရန် အသုံးပြုသည့် အနေအထားဖြစ်သည်။
Welding Power အရင်းအမြစ်

Megmeet Ehave စင်တီမီတာ 500h / 500 / 350 စီးရီး ဒစ်ဂျစ်တယ်စက်မှုလုပ်ငန်းကြီး * CO2 / MAG / MMA အသိဉာဏ်ရှိသော ဂဟေဆော်စက်
8. တပ်ဆင်ခြင်း၊ ကော်မရှင်ပေးခြင်းနှင့် လေ့ကျင့်ပေးခြင်း
ပို့ဆောင်ခြင်းမပြုမီ စက်ရုပ်စနစ်အား စုစည်းပြီး ကျွန်ုပ်တို့၏ ကုမ္ပဏီတွင် အပြည့်အဝ လုပ်ဆောင်နိုင်မည်ဖြစ်သည်။ဖောက်သည်သည် ၎င်းတို့၏ အစိတ်အပိုင်းများကို အစမ်းဂဟေဆော်ရန်နှင့် မပို့ဆောင်မီ ကြိုတင်လက်ခံမှုအတွက် ကျွန်ုပ်တို့၏ကုမ္ပဏီထံ ပေးပို့မည်ဖြစ်သည်။ကြိုတင်လက်ခံစဉ်အတွင်း၊ ဝယ်ယူသူ၏အော်ပရေတာများသည် ကနဦးနည်းပညာဆိုင်ရာသင်တန်းများကို လက်ခံရရှိမည်ဖြစ်သည်။
တပ်ဆင်ခြင်းအစီအစဥ်နှင့် နည်းပညာဆိုင်ရာလိုအပ်ချက်များကို တပ်ဆင်ခြင်းမပြုမီ 15 ရက်အလိုတွင် သုံးစွဲသူထံ တင်ပြမည်ဖြစ်ပြီး ဖောက်သည်သည် လိုအပ်ချက်များနှင့်အညီ အချိန်နှင့်တစ်ပြေးညီ ပြင်ဆင်မှုများ ပြုလုပ်ရမည်ဖြစ်သည်။ကျွန်ုပ်တို့၏ကုမ္ပဏီသည် သုံးစွဲသူ၏ဆိုက်တွင် စနစ်ထည့်သွင်းခြင်းနှင့် ကော်မရှင်ပေးခြင်းတို့ကို ဆောင်ရွက်ရန်အတွက် အင်ဂျင်နီယာများကို စေလွှတ်မည်ဖြစ်သည်။ဖောက်သည်သည် လုံလောက်သော ကော်မရှင်အဖွဲ့ဝင်လုပ်ငန်းခွင်များကို သေချာစေသည့်အခြေအနေအောက်တွင်၊ ပရိုဂရမ်သွင်းခြင်းမှ၊ ဝန်ထမ်းလေ့ကျင့်ရေးမှ အစုလိုက်အပြုံလိုက် အစမ်းထုတ်လုပ်ခြင်းအထိ အချိန် 10 ရက်ထက် မပိုစေရပါ။ကျွန်ုပ်တို့၏ ကုမ္ပဏီသည် ဖောက်သည်များအတွက် စက်ရုပ်စနစ် ပရိုဂရမ်ရေးဆွဲခြင်း၊ လည်ပတ်ခြင်းနှင့် ပြုပြင်ထိန်းသိမ်းခြင်းတို့ကို အသုံးပြုသူများအား လေ့ကျင့်သင်ကြားပေးပြီး သင်တန်းသားများသည် ကွန်ပျူတာ၏ အခြေခံအသိပညာရှိသင့်သည်။
တပ်ဆင်ခြင်းနှင့် လုပ်ငန်းတာဝန်ပေးခြင်းကာလအတွင်း သုံးစွဲသူသည် lifting equipment များ၊ forklift ၊ cables ၊ impact drill စသည်တို့ကဲ့သို့ လိုအပ်သောကိရိယာများကို ပံ့ပိုးပေးကာ သယ်ယူခြင်းနှင့် တပ်ဆင်စဉ်တွင် ယာယီအကူအညီပေးရမည်။
ကျွန်ုပ်တို့၏ ကုမ္ပဏီသည် အော်ပရေတာများ၏ လမ်းညွှန်မှု၊ တပ်ဆင်မှု၊ စက်ကိရိယာများ ခန့်အပ်မှုနှင့် လေ့ကျင့်ရေးတို့အတွက် တာဝန်ရှိပါသည်။ကျွန်ုပ်တို့၏ ကုမ္ပဏီသည် ပြုပြင်ထိန်းသိမ်းမှုနှင့် လည်ပတ်လေ့ကျင့်မှုများအတွက် တာဝန်ရှိပါသည်။အော်ပရေတာသည် စက်ကိရိယာများကို သူ့ဘာသာသူ လည်ပတ်ထိန်းသိမ်းပေးလိမ့်မည်။လေ့ကျင့်ရေးအကြောင်းအရာများ- စက်ကိရိယာဖွဲ့စည်းပုံမူအရ၊ ဘုံလျှပ်စစ်ပြဿနာဖြေရှင်းခြင်း၊ အခြေခံပရိုဂရမ်ရေးဆွဲခြင်းဆိုင်ရာ ညွှန်ကြားချက်များကို မိတ်ဆက်ခြင်း၊ ပုံမှန်အစိတ်အပိုင်းများ၏ ပရိုဂရမ်ကျွမ်းကျင်မှုနှင့် ပရိုဂရမ်ရေးနည်းများ၊ စက်ကိရိယာလည်ပတ်မှုဘောင်၏ နိဒါန်းနှင့် ကြိုတင်ကာကွယ်မှုများ၊
9. စစ်ဆေးပြီးလက်ခံပါ။
နှစ်ဖက်စလုံးမှ သက်ဆိုင်ရာ အလုပ်သမားများ ပါဝင်ခြင်းဖြင့် ကျွန်ုပ်တို့၏ ကုမ္ပဏီတွင် ကြိုတင်လက်ခံမှုကို ဆောင်ရွက်ပါသည်။ကြိုတင်လက်ခံစဉ်အတွင်း၊ ဝယ်ယူသူမှပေးဆောင်သော တိကျမှန်ကန်မှုအရ workpieces များကို စမ်းသပ်ရမည်ဖြစ်ပြီး၊ အရည်အချင်းပြည့်မီသော workpiece ကိုသာ ဂဟေဆော်ရမည်ဖြစ်ပြီး၊ လက်ခံမှုစမ်းသပ်မှုအစီရင်ခံစာကို ကြိုတင်ထုတ်ပြန်ရမည်ဖြစ်သည်။လက်ခံပြီးနောက် စက်ရုပ်ကို ပေးပို့ရမည်။ကြိုတင်လက်ခံမှုသေချာစေရန်အတွက် ပုံမှန်ထုတ်လုပ်မှုအတွက် 3 workpieces ပေးပါမည်။
၁၀။ပတ်ဝန်းကျင်လိုအပ်ချက်များ ဘေးကင်းရေးလိုအပ်ချက်များ- အသုံးပြုသူများအသုံးပြုသော ဂက်စ်နှင့် အပိုပစ္စည်းများသည် သက်ဆိုင်ရာနိုင်ငံတော်စံနှုန်းများကို လိုက်နာရမည်ဖြစ်သည်။
လေအရင်းအမြစ်ကို မီးဘေးမှ 15 မီတာထက်မနည်းအကွာအပြင် ဓာတ်ငွေ့နှင့် အောက်ဆီဂျင် 15 မီတာထက်မနည်းအကွာတွင်ထားရမည်။လေဝင်လေထွက်ကောင်းသော အရင်းအမြစ်သည် လေ၀င်လေထွက်ကောင်းအောင် ထိန်းသိမ်းထားပြီး လေနှင့်ဝေးသော အေးမြသောနေရာတွင် ထားရှိရမည်။
စက်ရုပ်အသုံးမပြုမီ ဓာတ်ငွေ့ပတ်လမ်းများအားလုံးကို စစ်ဆေးရပါမည်။လေယိုစိမ့်မှုရှိပါက အမှားအယွင်းမရှိစေရန် ပြုပြင်ရမည်။
ဖိအားကို ချိန်ညှိပြီး ဓာတ်ငွေ့ဆလင်ဒါကို ပြောင်းလဲသောအခါ၊ အော်ပရေတာသည် သူ့လက်တွင် ဆီဒြပ်စင်များ မရှိစေရပါ။
ambient humidity: ယေဘုယျအားဖြင့်၊ ပတ်ဝန်းကျင်စိုထိုင်းဆသည် 20% ~ 75% RH (ငွေ့ရည်ဖွဲ့ခြင်းမရှိပါက);ကာလတို (1 လအတွင်း) RH 95% ထက်နည်းသည် (ငွေ့ရည်ဖွဲ့ခြင်းမရှိဘဲ ဖြစ်ရပ်များ)။
ဖိသိပ်ထားသောလေ- 4.5 ~ 6.0 kgf / cm2 (0.45-0.6mpa)၊ ဆီနှင့်ရေ၊ ≥ 100L / မိနစ်
ဖောင်ဒေးရှင်း- အနိမ့်ဆုံး ကွန်ကရစ် ခိုင်ခံ့မှုသည် C25 ဖြစ်ပြီး ဖောင်ဒေးရှင်း၏ အနိမ့်ဆုံး အထူမှာ 400 မီလီမီတာ ဖြစ်သည်။
တုန်ခါမှု- တုန်ခါမှုအရင်းအမြစ်နှင့် ဝေးဝေးနေပါ။
ပါဝါထောက်ပံ့မှု- ပါဝါထောက်ပံ့မှု၏အဓိကမြေပြင်ကိုသေချာစေရန်အတွက် 50Hz (± 1) နှင့် 380V (± 10%) သုံးဆင့် AC ဗို့အားကို ထုတ်လုပ်ထားသော လျှပ်စစ်နှင့် အီလက်ထရွန်နစ်ပစ္စည်းအားလုံး၏ ပါဝါထောက်ပံ့မှုကို လက်ခံပါသည်။
ဖောက်သည်များကပေးသော ဝဘ်ဆိုက်ဝန်ဆောင်မှုများ-
ဖောင်ဒေးရှင်း၊ လိုအပ်သော ဂဟေဆော်ခြင်းလုပ်ငန်း၊ အရန်ကိရိယာများ ပြုပြင်ခြင်းစသည်ဖြင့် ပေးပို့ခြင်းမပြုမီ လိုအပ်သော ပြင်ဆင်မှုများ၊
ဖောက်သည်၏ site တွင်သယ်ဆောင်ခြင်းနှင့်သယ်ယူပို့ဆောင်ရေး။
11. အာမခံနှင့် ရောင်းချပြီးနောက်ဝန်ဆောင်မှု weld power source ၏အာမခံကာလ 12 လဖြစ်သည်။
စက်ရုပ်ကိုယ်ထည်၏ အာမခံကာလမှာ 18 လဖြစ်သည်။
ပုံမှန်အသုံးပြုမှုအောက်တွင် ချို့ယွင်းမှု သို့မဟုတ် ပျက်စီးခြင်းနှင့် စက်ကိရိယာများသည် အာမခံကာလအတွင်းတွင်၊ ကျွန်ုပ်တို့ကုမ္ပဏီသည် EXW (လူသုံးကုန်ပစ္စည်းများ၊ ပြုပြင်ထိန်းသိမ်းမှုထုတ်ကုန်များ၊ ဘေးကင်းရေးပြွန်များ၊ အချက်ပြမီးများနှင့် ကျွန်ုပ်တို့၏ကုမ္ပဏီမှ အထူးသတ်မှတ်ထားသော အခြားစားသုံးနိုင်သောပစ္စည်းများကို အခမဲ့ပြုပြင်ခြင်း သို့မဟုတ် အစားထိုးနိုင်ပါသည်။)
အာမခံမပါဘဲ အားနည်းချက်ရှိသော အစိတ်အပိုင်းများအတွက်၊ ကျွန်ုပ်တို့၏ ကုမ္ပဏီသည် ပုံမှန်ဝန်ဆောင်မှုသက်တမ်းနှင့် အားနည်းချက်ရှိသော အစိတ်အပိုင်းများ၏ ထောက်ပံ့မှုစျေးနှုန်းကို ကတိပြုထားပြီး စက်ပစ္စည်းများသည် တည်ငြိမ်သော ထောက်ပံ့ရေးလမ်းကြောင်းကို ငါးနှစ်အထိ ပံ့ပိုးပေးပါသည်။
အာမခံကာလမကျော်လွန်ပါက၊ ကျွန်ုပ်တို့၏ကုမ္ပဏီသည် တစ်သက်တာအခကြေးငွေပေးချေသည့်ဝန်ဆောင်မှုကို ဆက်လက်ပံ့ပိုးပေးမည်ဖြစ်ပြီး ပြည့်စုံသောနည်းပညာပိုင်းဆိုင်ရာပံ့ပိုးမှုနှင့် လိုအပ်သောစက်ပစ္စည်းဆက်စပ်ပစ္စည်းများကို ပံ့ပိုးပေးမည်ဖြစ်ပါသည်။
12. ပေးပို့ခြင်း ပူးတွဲပါစာရွက်စာတမ်း တပ်ဆင်ပုံများ- စက်ပစ္စည်းအုတ်မြစ်တည်ဆောက်ပုံများ နှင့် စက်ကိရိယာတပ်ဆင်ပုံများ
◆ ဒီဇိုင်းပုံများ- တပ်ဆင်ပုံနှင့် စက်ကိရိယာပုံများ
◆လက်စွဲစာအုပ်- စက်ကိရိယာလည်ပတ်မှုလက်စွဲ၊ ပြုပြင်ထိန်းသိမ်းမှုလမ်းညွှန်နှင့် စက်ရုပ်လုပ်ငန်းလမ်းညွှန်
◆ဆက်စပ်ပစ္စည်းများ- ပေးပို့မှုစာရင်း၊ လက်မှတ်နှင့် အာမခံကတ်။



